本文分析和探讨使用 OpenSees 时可能会遇到的 5 个问题,分别是
- 如何在时程分析中改变步长
-
twoNodeLink和zeroLength单元的正负向 - 如何施加预拉力
-
twoNodeLink单元的特性 -
recorder输出的几个问题
第 1 问 如何在时程分析中改变步长
减小时程分析步长可以改善收敛性
首先,建立一个简单的弹性时程分析模型。模型采用单自由度,两个节点,位置重合,用 twoNodeLink 单元相连。 twoNodeLink 单元中赋予材料属性,用单轴材料模型 Elastic 来实现。具体代码如下
1 | model BasicBuilder -ndm 1 -ndf 1 |
由于本例中结构为弹性,所以分析很快结束。但是当结构非线性较强时,可能会发生不能收敛的情况。例如,将上面代码中
1 | uniaxialMaterial Elastic 1 1.0e5 |
改为
1 | uniaxialMaterial Steel01 1 200. 1.0e5 0.1 |
即增加材料非线性,使 twoNodeLink 单元的内力达到 200 后,刚度褪化为初始刚度的 0.1 倍。这时再运行,得到以下错误信息
1 | WARNING: CTestNormDispIncr::test() - failed to converge |
即迭代不收敛。这时很容易想到,由于增加了几何非线性,模型收敛更加困难。一个很容易的解决方法是,把原代码中的
1 | analyze 3000 0.01 |
改成
1 | analyze 6000 0.005 |
即缩小每一分析步的步长。这时发现,模型收敛。
计算时间与收敛性的平衡
尽管减小分析步步长可以改善收敛性,但是会增长计算时间,这就形成了一对矛盾。在地震作用较小的时段,结构非线性发展很小,可以用较大的步长快速算过。但是在地震作用较大的时段,结构可能产生较强非线性,所以要用足够小的步长来保证收敛。
发了平衡模型分析所用的总时间和模型的收敛性,就要在运算的过程中动态地改变步长,以达到平衡。
下面介绍一种动态改变分析步长的方法。代码如下
1 | proc timeHistoryAnalyze {npts dt tol} { |
将上述代码放入文件中,就可以在分析中调用了。保存文件名为 opq1-dynamic-interval.tcl ,再将原代码中的
1 | analyze 3000 0.01 |
改为
1 | source opq1-dynamic-interval.tcl |
运行,从控制台中可以看出,在某些分析步中第一次使用 0.01 步长没有收敛,程序自动将步长调整为 0.005 ,实现了收敛。
源码下载
本问的源代码可以点击下载
注意:除了减少时间步长之外,还有其它的改善收敛性方法,请参考:如何使 OpenSees 模型收敛?SmartAnalyze 帮助您
第 2 问 twoNodeLink 和 zeroLength 单元的正负向
正负向问题何时产生
有的时候,一些简单的接触问题中,可能会采用简化的模拟方法,用只压不拉的模型来近似模拟接触。即在接触面所定义的两个点相互挤压时,单元产生一个较大的刚度,而两个点相互脱开时,刚度几乎没有。在 OpenSees 中,有一个简单的单轴材料模型,即 ENT (Elastic No Tension Material),可以较好地模拟这一特性。
通常,可以把这一材料模型作为力-位移关系模型来使用,赋于 zeroLength 单元或 twoNodeLink 单元中。这两个单元都支持 零长度 ,而通常接触面会被自然地视为是一个零长度的单元。那么此时就会产生问题,对于 零长度 的单元,如果采用 ENT 模型,什么方向是拉,什么方向是压呢?
算例
下面代码代表的模型,是平面模型,用两个 twoNodeLink 将两个位置相同的节点连接起来,其中一个赋予 ENT 材料,另一个赋予 Elastic 材料,以避免结构刚度矩阵奇异。两个节点中一个固定,另一个被施加正向的单位位移。观察结构的力-位移关系。
1 | model BasicBuilder -ndm 2 -ndf 3 |
输出的文件 node.txt 的内容为
1 | 2 0.2 |
可以看出,此时结构刚度为 10,与 Elastic 材料的刚度相同。
现在把位移控制语句
1 | integrator DisplacementControl 1 1 0.2 |
改为
1 | integrator DisplacementControl 1 1 -0.2 |
即赋予一个负向的位移,这时的 node.txt 文件的内容为
1 | -4 -0.2 |
可见此时结构的刚度发生了变化。为 ENT 和 Elastic 材料并联后的刚度。
那么同样是将两个重合的点拉开,为什么正向拉开被 ENT 材料认为是受拉,而负向拉开被认为是受压呢?很容易想到,这与定义单元时,两个节点 iNode 与 jNode 的定义顺序有关。
为了验证,把原代码中
1 | element twoNodeLink 2 0 1 -mat 2 -dir 1 |
改为
1 | element twoNodeLink 2 1 0 -mat 2 -dir 1 |
仍采用负向加载,得到的 node.txt 结果为
1 | -2 -0.2 |
可以发现,刚度确实发生了变化。
采用 zeroLength 单元替换 twoNodeLink 单元,得到的结果完全相同。
避免节点顺序的影响
虽然发现了这一特性,可以通过仔细定义两个节点的顺序来解决这一问题,但还是不尽人意。所以在实际使用中,建议将两个节点隔开一点距离,避免完全重合。这样,两个节点距离减小的方向就是压缩的方向,两个节点距离增大的方向就是拉伸的方向,与节点的定义顺序无关。
将上面代码中
1 | node 1 0. 0. |
改为
1 | node 1 0.01 0. |
再进行尝试,发现不论顺序如何,拉和压正常了。
源码下载
本问的源代码可以点击下载。
第 3 问 如何施加预拉力
用材料模型施加预拉力
在一些有限元软件中,施加预拉力可以通过降温法方便地完成。然而,由于 OpenSees 的热学模块还不完善,不能用这一方法来施加预拉力,但是, OpenSees 中的单轴材料模型 Steel02 可以帮助用户施加预拉力。
Steel02 代表Menegotto-Pinto模型,有很多参数可以选择。用于施加预拉力时,最重要的参数是 $sigInit ,也就是初始应力。定义了初始应力,也就相应地定义了施加的预拉力。通常 Steel02 可以与 truss , corotTruss , twoNodeLink 等单元配合使用。
预拉力定义方法
下面通过一个算例来介绍有预拉力模型的建立方法。在平面两自由度体系中,设置两个节点,用一个 truss 单元来模拟受压结构,再用另一个 truss 单元来模拟一个后张法预应力钢绞线,张拉于简支梁的两端。
1 | model BasicBuilder -ndm 2 -ndf 2 |
对于 Steel02 的参数,重要的几个是 Fy , E , sigInit 。由于不希望预应力钢绞线出现屈服,所以一些与材料非线性有关的参数在这里暂不细致考虑。用 truss 单元来模拟钢绞线,通过分析 1 步,可以实现预拉力的施加。
在本模型中,两个 truss 的刚度分别为
$$K_1 = \frac{E_1A_1}{L} = \frac{2.0\times 10^5\times 1\times 10^5}{2000} =1\times 10^7$$
$$K_2 = \frac{E_2A_2}{L} = \frac{2\times 10^6\times 500}{2000}=5\times 10^5$$
定义了钢绞线的初应力为
$$\sigma_p = 2\times 10^3$$
在施加预拉力时,钢铰线产生了初始变形
$$\Delta_p = \frac{F_p}{K_2}=\frac{\sigma_p A_2}{K_2}$$
张拉后,预拉力由 1 单元承担。根据力的平衡,设\(F_1\)为 1 单元中的压力,\(F_2\)为 2 单元中的拉力,则有
$$F_1 = F_2$$
在此过程中,1 单元和 2 单元同时产生了压缩变形\(\Delta\),则此时钢铰线的实际变形为
$$\Delta_2 = \Delta_p -\Delta$$
根据物理关系,有
$$F_1 = K_1 \Delta$$
$$F_2 = K_2 \left(\Delta_p-\Delta\right)$$
代入上式,得
$$K_1 \Delta = K_2 \left(\frac{\sigma_p A_2}{K_2}-\Delta\right)$$
解得
$$\Delta = \frac{\sigma_p A_2}{K_1+K_2}=0.0952$$
$$F_1 = F_2 = K_1 \Delta=952000$$
查看输出的 node.txt 文件
1 | 1 -0.0952381 |
和 ele1.txt 文件
1 | 1 952381 0 -952381 -0 |
与计算的结果吻合。
施加预拉力后的加载
在实际结构分析中,在施加预拉力后,通常要进行进一步加载。在本问中以轴向加载为例,探讨进一步加载的方法。
在上一小节模型的基础上,添加如下代码
1 | pattern Plain 1 Linear { |
即将结构的 1 节点向正向按位移加载,此时得到 node.txt 文件为
1 | 1 -0.0952381 |
我们知道,两个单元并联,则并联后的刚度为
$$K=K_1+K_2=1.05\times 10^7$$
在第一次移动 0.01 位移的时候,施加的外力为
$$F=Kd_1=1.05\times 10^7\times 0.01 = 1.05\times 10^5$$
但是从 node.txt 中得到的外力为 78750.5 ,与计算的结果不一致。其中的错误可能是因为,在加载过程中,在每一分析步运行时,预应力都被通过某种机制重复地施加了一次。详细原因这里不作细究。解决这一问题的方法很简单,只要在分析之间加上一句话
1 | loadConst -time 0.0 |
这时再运行,得到 node.txt 为
1 | 1 -0.0952381 |
与计算的结果一致。
以上分析表明,含预拉力模型实际加载前要将 time 归零。
源码下载
本问的源代码可以点击下载。
第 4 问 twoNodeLink 单元的特性
twoNodeLink 单元
在 OpenSees 的单元库中,目前的 连接单元 目录下只有一个单元 twoNodeLink 。这个单元可以把单轴应力-应变材料关系模型直接作为结构的力-位移关系模型,有广泛的应用情景。但是这一单元有很多难以把握的特性,如果不能充分理解,很容易出错。因此对 twoNodeLink 单元的特性要正确地理解。
低维度空间中指定局部坐标轴方向
在有限单元法中,每一个单元都有自己的局部坐标系。如果定义为零长单元,则单元的局部坐标方向与整体坐标方向相同。如果为非零长单元,则单元的局部 1 轴为 iNode 指向 jNode 方向。但是局部 2 轴的方向没有指定。这就需要用户来指定。语句为
1 | -orient <x1 x2 x3> y1 y2 y3 |
如果用户不指定 y 方向,程序会输出警告信息
1 | WARNING TwoNodeLink::setUp() - element: 1 |
在指定方向的语句中, y1 , y2 , y3 分别代表 2 轴方向向量的坐标(在全局坐标系下)。用户也可以用同样的方式指定局部 1 轴的坐标,即赋予语句中 x1 , x2 , x3 的值。
那么这时产生了一个问题。对于三维空间中的模型,定义一个方向向量需要三个坐标,但是如果在二维空间中,如何自定义 twoNodeLink 单元的方向呢?
下面我们建立一个算例,来探讨这个问题。
在二维三自由度空间中,建立一个两节点模型,用 twoNodeLink 单元相连。代码如下
1 | model BasicBuilder -ndm 2 -ndf 3 |
查看 node.txt 文件,得到
1 | 1 1 0 0 |
这个模型没有太多实际意义,只是告诉我们,当前没有自定方方向时,局部 1 轴是两个节点的连线方向。那么如果想指定局部 1 轴的方向怎样处理?我们建立一个新的模型。
在这个模型中,希望把 twoNodeLink 单元的局部 1 轴坐标赋于全局坐标的 2 方向上。那就要用两个方向向量来分别定义局部 1 轴和局部 2 轴。在二维空间中,每个方向向量有两个坐标。把代码改为
1 | model BasicBuilder -ndm 2 -ndf 3 |
这时程序会报错
1 | WARNING insufficient arguments after -orient flag |
既然提示输入的变量不够,在二维空间中,默认所有 z 坐标都为 0,那就把 z 坐标为 0 加入进去,把单元定义语句改为
1 | element twoNodeLink 1 0 1 -mat 1 -dir 1 -orient 0. 1. 0. 1. 0. 0. |
此时再运行,控制台输出的信息表明,已经指定了方向。
1 | WARNING TwoNodeLink::setUp() - element: 1 |
查看 node.txt 文件,发现结果正确
1 | 1 0 1 0 |
进一步探究发现,如果 z 坐标不为 0,得到的结果会出现错误。因此,在对 twoNodeLink 单元赋方向时,如果坐标数小于 3,应对不存在的坐标值赋 0。
用户定义方向坐标不垂直
如果用户定义的两个方向坐标不垂直,程序如何处理呢?
在上述二维模型的基础上做一些小的修改,输出结构的初始刚度矩阵
1 | model BasicBuilder -ndm 2 -ndf 3 |
得到
1 | 1 0 0 |
调整 y1 , y2 两个坐标的值,使局部两轴不正交,发现得到的刚度矩阵不变。调整 x1 , x2 两个坐标的值,发现刚度矩阵改变。
上面的小例子说明,如果定义的两个方向不正交,程序是以局部 1 轴的定义为准的。实际上,程序是采用定义的两个向量叉积作为局部 3 轴,再用局部 3 轴与局部 1 轴的叉积作为局部 2 轴的。与 geomTransf 定义坐标的方法类似。
twoNodeLink 的自由度耦合
观察上一小节中得到的刚度矩阵,可以看出, twoNodeLink 单元的局部 2、3 自由度是耦合的,这在使用的过程中要特别注意。如果不希望发生自由度耦合的话,应该定义多个在 1 方向上的 twoNodeLink 单元,而不是使用一个单元的多个方向。
对于程序给出的刚度矩阵
$$A_{ij}=\left[\begin{matrix}1&0&0\\0&2&-1\\0&-1&3.5\end{matrix}\right]$$
我们对矩阵中的元素一一进行考查。
对于\(A*{11}\)和\(A*{22}\),很明显是我们定义的两个刚度。但是对于\(A*{33}\),这个刚度与我们定义的刚度是不同的,因为发生了自由度耦合。这一点要特别注意。\(A*{23}\)和\(A_{32}\)元素不为 0,也是由于自由度耦合造成的。那么这几个刚度值是如何计算出来的呢?
在这里,有一个 shear distance 的概念,直接影响了结构的刚度矩阵。 twoNodeLink 的原理如下图所示, shear distance 主要影响的是代表局部 2 轴刚度,也就是图中\(u_{b,2}\)弹簧的位置。在默认状态下, shear distance 定义为单元的中部,即如图所示位置。
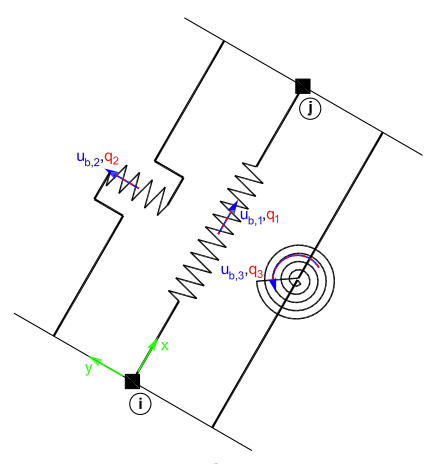
此时,如果 iNode 固定,而 jNode 产生单位转角时,可以看到,对于\(u*{b,2}\)弹簧所连接的两个刚臂,与 iNode 一端相连的刚臂是固定的,而与 jNode 一端相连的刚臂产生了一个转角。由于 jNode 的平动自由度被约束,在\(u*{b,2}\)弹簧位置就会产生一个相对位移,大小为转角与转动刚臂长度的乘积(小变形情况下)。在本例中,刚臂长度为 0.5,\(u_{b,2}\)弹簧的刚度为 2,因此刚度矩阵中
$$A_{23}=A_{32}=-0.5\times2=-1$$
同时,刚臂转动后\(u_{b,2}\)弹簧产生的力会产生一个附加弯矩,作用在 jNode 上,大小为
$$M_s = 1\times 0.5=0.5$$
与定义的转角弹簧刚度叠加,得到刚度矩阵中
$$A_{33}=3+0.5=3.5$$
剪切距离的定义
剪切距离 shear distance 还可以由用户自定义。用剪切中心点与 iNode 之间的距离与单元长度之比来确定。在二维空间中定义一个区间\([0, 1]\)中的数,在三维空间中定义两个区间\([0, 1]\)中的数。默认状态下这个数取值为 0.5。
将上面代码中单元定义的部分改成
1 | element twoNodeLink 1 0 1 -mat 1 2 3 -dir 1 2 3 -orient 1. 0. 0. 0. 1. 0. -shearDist 0.2 |
得到输出的刚度矩阵为
1 | 1 0 0 |
发现与上一小节中得出的结论一致。
源码下载
本问的源代码可以点击下载。
第 5 问 recorder 输出的几个问题
特征值与特征向量输出
想要获得结构的特征向量,需要使用 recorder 输出。以一个三维空间中的两自由度体系为例
1 | model BasicBuilder -ndm 2 -ndf 3 |
运行,控制台中输出了两个数字
1 | 7.782659e+01 2.065031e+03 |
这就是结构的两个特征值。在 OpenSees 中,特征值\(\lambda\)的定义为
$$\left(K-\lambda M\right)\phi=0$$
即我们通常所说的\(\omega^2\)。它与结构周期的关系为
$$T=\frac{2\pi}{\omega}=\frac{2\pi}{\sqrt{\lambda}}$$
因此,算例结构的两阶周期为
$$T_1 = \frac{2\pi}{\sqrt{77.83}}=0.71 \mathrm{s}$$
$$T_2 = \frac{2\pi}{\sqrt{2065}}=0.14 \mathrm{s}$$
对应两个周期的振型,可以从 recorder 生成的两个文件中找到。打开 eigen1.txt ,内容为
1 | 0.029707 0 -2.58115e-05 0.0907468 -1.35525e-20 -3.28741e-05 |
由于 recorder 中输出了两个节点,每个节点输出了三个自由度,所以共输出了 6 个数字,前三个为节点 1 在三个自由度上对应 1 阶周期的振型,后三个为节点 2 的振型。可以看出,在 1 阶振型中,2 方向和 3 方向的位移都远小于 1 方向,可以忽略。只关注在 1 方向上的位移即可。这个位移值与振型的值是一致的。即 1 阶振型为
$$\phi_1 = \left\{ \begin{matrix}0.029707&0.0907468\end{matrix}\right\}^T$$
可以根据用户的需要进行归一化。从 eigen2.txt 文件中可以找到 2 阶振型
$$\phi_2 = \left\{ \begin{matrix}-0.0641677&0.0420121\end{matrix}\right\}^T$$
值得一提的是,如果所求的特征值数与结构的振动自由度数相同,要将特征值输入语句改为
1 | eigen -fullGenLapack 2 |
否则程序会报错。这在小模型算例中可能会用到。
节点加速度输出
在地震响应分析中,我们关心结构的位移和速度通常是相对于地面的相对位移和相对速度,而关心结构的加速度通常是绝对加速度,因为只有绝对加速度才能与牛顿第二定律建立关联。
在用 recorder 输出时程分析结果时,应该特别注意输出的是相对值还是绝对值。对于位移和速度,输出的都是相对值,和我们关注的一样。而对于加速度,要特别注意。
如果采用语句
1 | recorder Node -file node.txt -node 1 -dof 1 accel |
则输出的是相对加速度。如果希望输出绝对加速度,则必须将语句改为
1 | recorder Node -file node.txt -timeSeries 1 -node 1 -dof 1 accel |
这时输出的是绝对加速度。
拟时间输出
将第一节中的模型稍作修改,得到一个悬臂柱水平位移加载的模型。
1 | model BasicBuilder -ndm 2 -ndf 3 |
注意模型中对 pattern 的定义是必不可少的。在 OpenSees 中, DisplacementControl 的实现采用了一种很巧妙的机制。首先,要用 pattern 命令定义结构中的荷载,这些定义为参照荷载。用\(P_{\mathrm{ref}, i}\)来表示。在本例中,仅定义了一个水平向,大小为 1000 的参照荷载\(P_{\mathrm{ref}, 1}\)。每个参照荷载可以定义一个对应的荷载放大系数\(\lambda_i\)。在本例中没有指定放大系数,则\(\lambda_1=1\)。
对于结构所受的实际外荷载,可以用下式描述。
$$P_f = P_c + \lambda\sum_{i=1}^{\mathrm{np}}{\lambda_iP_{\mathrm{ref}, i}}$$
式中的\(\lambda\)实际上就是所谓的拟时间(pseudo-time),也就是 recorder 中 -time 输出的对应值。对于\(P_c\),实际上是指不参与被拟时间放大的荷载,比如第三问中的钢铰线预拉力,再比如低周往复加载时施加的重力荷载。这可以通过以下语句实现。
1 | loadConst -time 0.0 |
在该语句之前的荷载,不再被拟时间放大。同时拟时间也被归零。其它荷载都到乘上拟时间之后施加在结构上。
打开 node.txt ,可以看到输出结果
1 | 0.9375 0.1 |
第一列表示的是拟时间。也就是所有荷载的乘数。第二列是节点 2 的 1 方向位移。第一行数据的意思是,当节点 2 在 1 方向产生 0.1 的位移是,拟时间为 0.9375,也就是结构所受的水平力为 0.9375×1000=937.5。依次类推。
通过 node.txt 文件可以输出结构的荷载-位移曲线。
单元内力输出
打开上一小节中生成的 ele.txt 文件,内容如下。
1 | 0.9375 -937.5 0 3.75e+06 937.5 0 -1.875e+06 |
其中第 1 列为拟时间,第 2 到 7 列为单元受力。前三列为 iNode 节点受的等效外力,后三列为 jNode 节点受的等效外力。分别按 1、2、3 三个方向排序。这些力是定义在全局坐标系下的。单元力输出时,输了上节中使用的 force 一般还有另外两种选择: localForce 和 basicForce 。
下面我们把上一小节中 elasticBeamColumn 单元替换成 dispBeamColumn ,并赋予一个 250×250×14×14 的 H 形纤维截面。一种快速生成纤维截面的方法是使用本站[结构工具箱][9]中 OpenSees 前处理模块的[纤维截面生成工具箱][11]。
生成的纤维截面的代码为
1 | section Fiber 1001 { |
该截面中聚合了抗剪和抗扭刚度。用这一截面替换上一小节的弹性截面,得到模型代码如下
1 | model BasicBuilder -ndm 2 -ndf 3 |
模型中使用了三种单元 recorder ,分别输出 force 、 localForce 和 basicForce 。
ele.txt 文件中内容为
1 | -45.4835 2.74536e-14 181934 45.4835 -2.74536e-14 -90967 |
ele-local.txt 文件中内容为
1 | 2.74536e-14 45.4835 181934 -2.74536e-14 -45.4835 -90967 |
ele-basic.txt 文件中内容为
1 | -2.74536e-14 181934 -90967 |
不难看出, force 语句得到的等效力是建立在全局坐标系下的, localForce 语句得到的等效力是建立在单元局部坐标系下的。而 basicForce 中输出的力为轴力和两个端弯矩,同样也是在局部坐标系下建立。
对于 force 和 localForce 的输出都很好理解,那么为什么 basicForce 只输出了两个三个量呢?为什么剪力没有了呢?这与 OpenSees 中采用的有限单元法有关。这一部分比较复杂,将在其它文章中进行介绍。
纤维截面应力应变输出
如果需要知道纤维截面的应力,可以通过 recorder 进行输出。在上例的代码中增加一句
1 | recorder Element -file stressStrain.txt -ele 1 section 1 fiber 93.00 -95.00 stressStrain |
即可实现纤维截面应力和应变的输出。在增加的语句中, section 1 表示单元的积分截面。由于在单元 1 的定义中取了 5 个积分截面,所以 section 后面的数字可以为 1~5,表示 5 个积分截面。 fiber 后面的两个数字表示所考察纤维的局部坐标。
stressStrain.txt 文件如下
1 | 0.34057 1.70285e-06 |
第一列表示应力,第二列表示应变。
源码下载
本问的源代码可以点击下载。


